|
Dean Fortier I'm a research engineer at Microsoft Research in Redmond, where I support a team building models for physical AI. I am fairly new to research, but prior to this I have been a Robotics Software Engineer at Optitrack supporting their ROS package and linux compatibility and Fresh Consulting where I supported various robotics related engineering projects listed below. |

|
Research PortfolioI'm interested in robotics, computer vision, electronics, firmware, and deep learning. Most of my work is at the intersection of hardware, software, and control. |

|
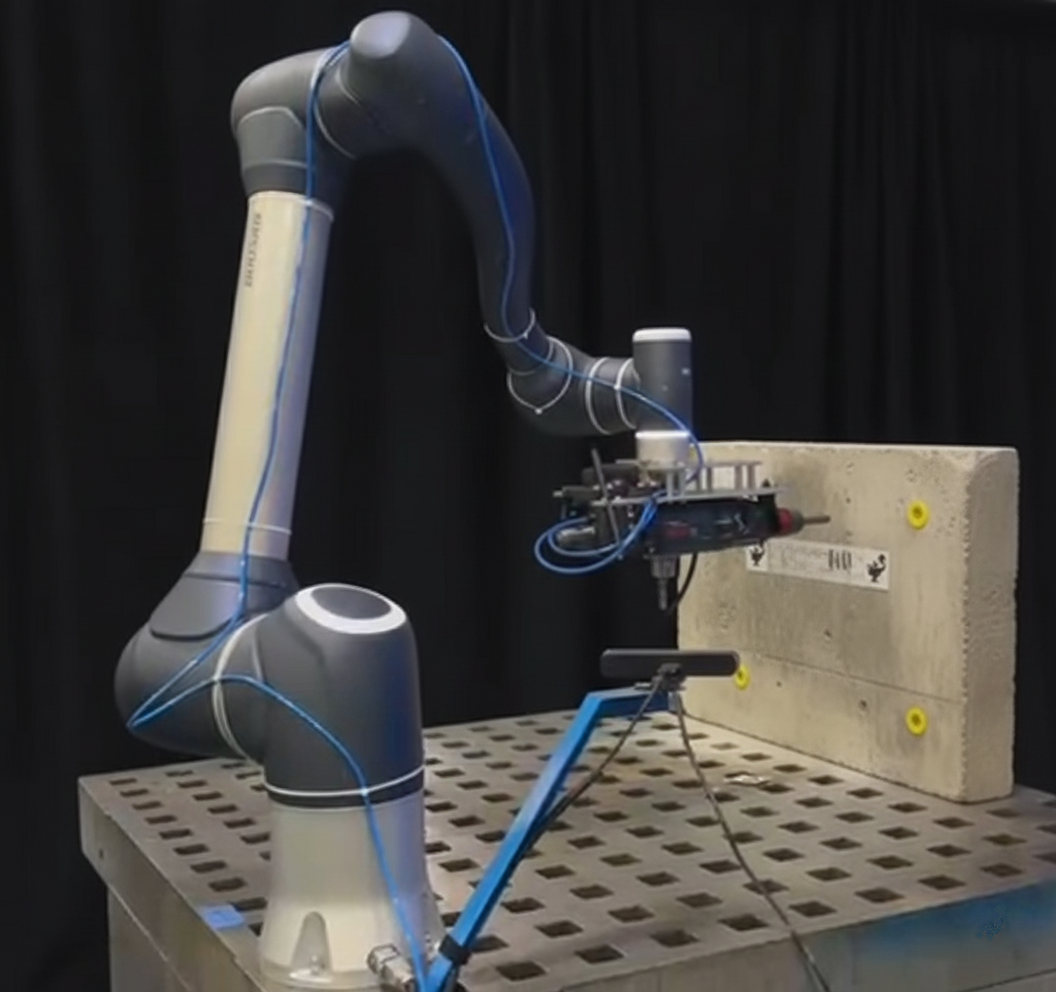
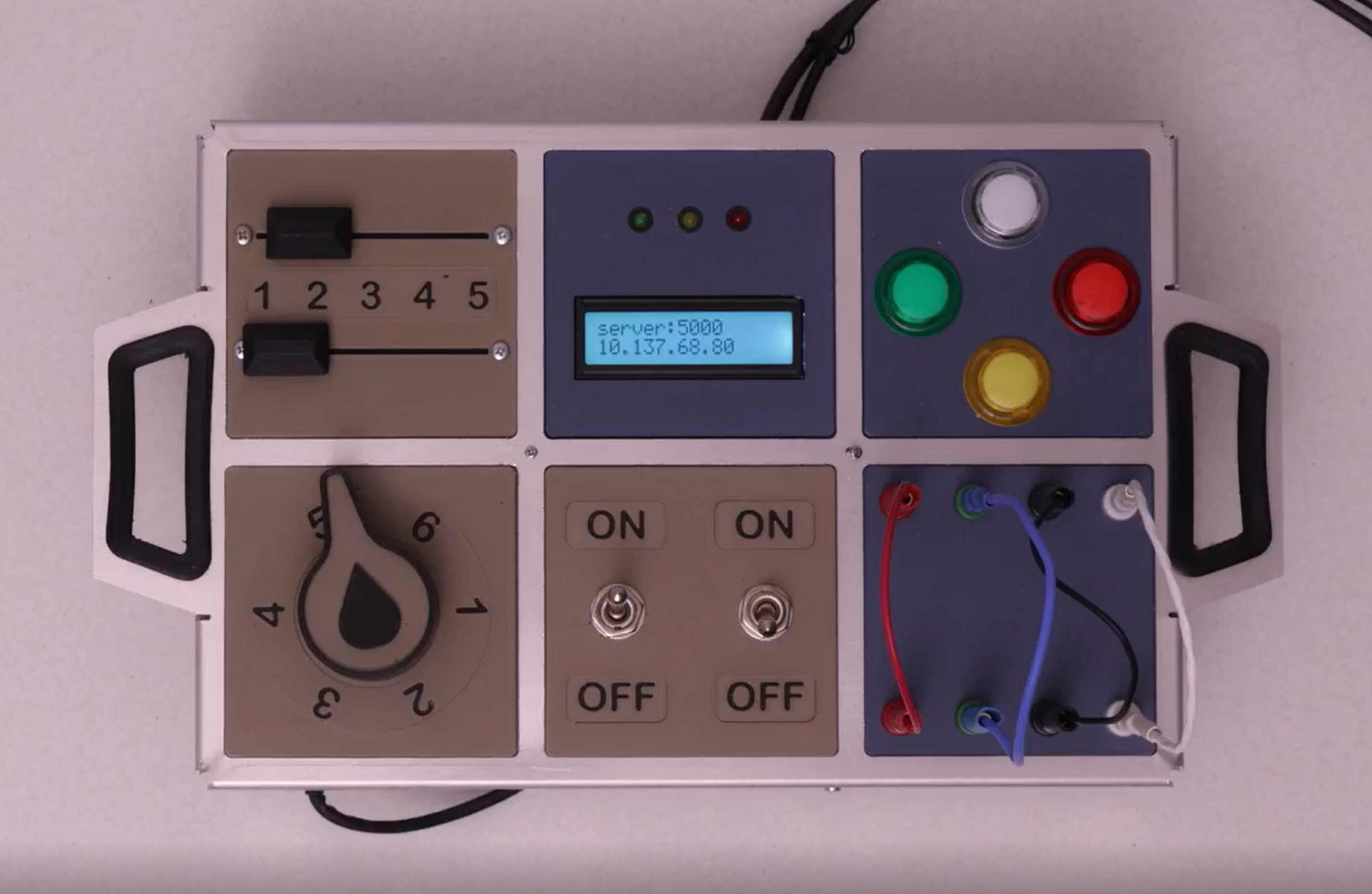
Benchmarking Affordance Generalization with BusyBox
Dean Fortier, Timothy Adamson, Tess Hellebrekers, Teresa LaScala, Kofi Ennin, Michael Murray, Andrey Kolobov, Galen Mullins Eval&Deploy Workshop at CoRL, 2025 project page Modular 3D-printable robotic manipulation benchmark for evaluating affordance generalization in robot foundation models. |
Engineering PortfolioSelected engineering and robotics projects demonstrating practical system integration, prototyping, and deployment. |
|
|
DrillSense
Dean Fortier, Timothy Adamson, Mitch Tolson for Genie Robotics, July 2025 DrillSense blog post DrillSense is a demonstration of an onsite journeyman level physical AI assistant. This assistant was capable of combining the accuracy of computer vision and robot control with high level reasoning and collaboration using OpenAI voice AI. |

|
Robotic Hockey table
Scotty Paton (Design), Nissa van Meter (Electrical), Dean Fortier (Controls/Vision), Sam Sanders (PM), Richard Johnson (Tech), Grant Ritter (Mechanical) Microsoft Ignite 2020 Fresh Consulting Blog Post Microsoft AI partnered with us to develop a promotional hardware piece for the Autonomous Systems group. They needed a bold platform to deploy, test, and interact with AI models created with Project Bonsai. I built out the vision, calibration, and controls systems. |

|
Crowsnest - Tractor Bird's eye view
Dean Fortier, John Houston, Vishal Prabhu for John Deere R&D 2022 We developed a multi-camera calibration system using visual fiducials printed on inter-locking floor mats to cover an arbitrarily wide area. This calibration system determines the 6D pose of each camera and projects all camera images onto a single plane allowing for a simulated 360° view around the tractor. |
|
Interactive BusyBox Manipulation
Galen Mullins, Dean Fortier, Timothy Adamson Microsoft Project Green 2025 blog post We showcase an agentic system consisting of a voice agent front end for interacting with a user, a VLM to observe the state of the BusyBox, and a VLA to control bimanual manipulation of the Busybox |
|
|
Optitrack ROS Support
Dean Fortier, Stuart Guarnieri github link This ROS2 driver allows Optitrack's NatNet streaming service to connect to robot applications easier. |
|
Website template -> here! |